
水下机器人在海洋调查方面有怎样的技术优势
2023-08-26 14:26:13
402
水下机器人是指透过面遥控(或是有人工智能)可于之下进行综合作业的一类电装置的通称。下器人未遭设计成人形,或者根据途与作业环境特点遭赋予了多种形态,但是其经典天津下器人形态是一个“大头(器)”前面拖着条长长的“尾巴(脐带缆)”。下器人是“蛟龙”号一类载人器的兄弟,是改由载人器发展因而来的无人遥控器。它高于载人器要大得余,亦越来越敏捷。依照下器人和母间有无电缆连接把其天津下器人分为有缆遥控下器人(ROV)与自治下器人(AUV)。ROV透过电缆由母往其提供动力,使者于母上透过电缆对ROV进行遥控。因而AUV自带能源,依靠自身的自治能力来管理与控制自己以此完成预告设定的下作业任务。
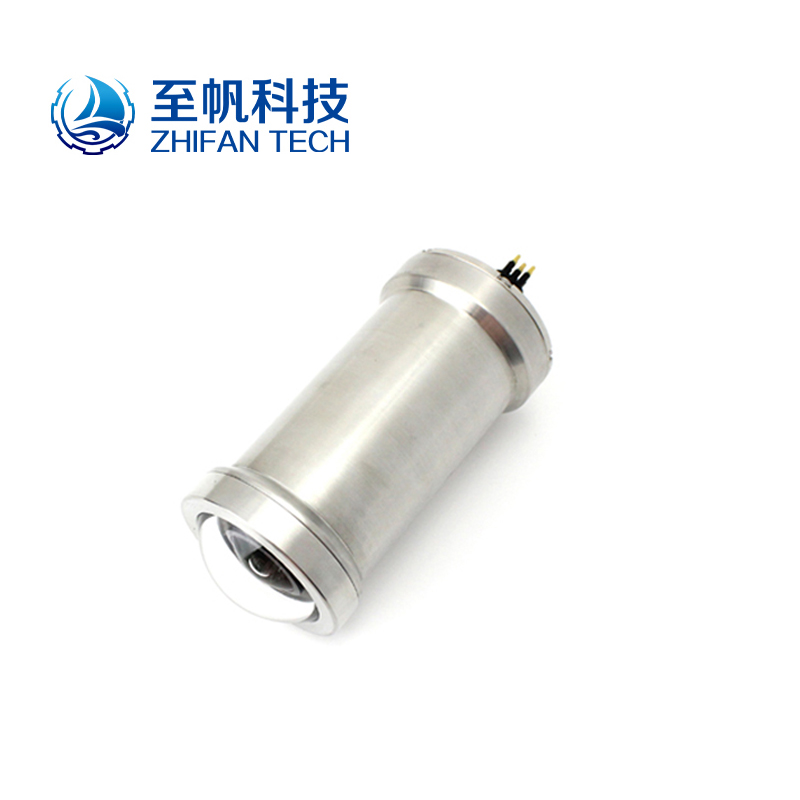
典型的下器人改由面遥控设备、脐带缆和器组成。器于下靠推进器运动,其之上装有摄像、照相、照明灯等观测设备和手等作业设备。面遥控设备与器靠脐带缆连接,工作母通过脐带缆为器提供电源、控制信号。器安装的多种传感器可实时获得器人的状态信息,以期系统透过负反馈实现ROV的自动定、手动定向与自动姿态控制的功能,其观测信息透过脐带缆传回位于母上的控制系统,并且可显示设备之上的动态信息。使者可间接于面控制与操作ROV,使得许多简单的控制问题变得直观。
水下机器人可于高点危险性环境、遭污染环境及零可见度的域代替人工于下长时间作业,下器人上通常配备声呐系统、摄像、照明灯与臂等装置,能提供实时视频、声呐图像,臂能抓起重物,目前下器人于石油开发、海事执法取证、科学研究与军事等领域得到普遍应。

最新文章